Kinematik çift: kavram, sınıflandırma. Bilyalı eklem, menteşe döngü
Mühendislikte herhangi bir karmaşık mekanizma oluşurbir dizi basit elementten. Sistemin bir bütün olarak nasıl işlev gördüğünü anlamak için, her bir düğümün işini parçalara ayırmak gerekir. Ve bu, her şeyden önce, bir kinematik çiftin ne olduğu hakkında bir anlayış.

Temel şartları
Eğer iki öğe (link) alırsanızbirbirleriyle iletişim kurarken, bu ilişki mobil iken, bir kinematik çiftimiz var (KP). Ayrıcalıklı özelliği, bağlantıların hareketinde belirli bir sınırlamadır.
Bir katı sınırlı kapasiteye sahip olabilirhareket, ve sonra bir iletişim koşulu gibi bir şey var. Çiftdeki bağlantıların etkileşimi göz önünde bulundurularak beşe kadar iletişim koşulu sayılır. Bu yüzden sınıflara bölünme. Kinematik çiftler için beşi çıkarıldı, her birinin kendi hareketlilik derecesi var. Sınıfta altı derece hareketlilik var. Tüm modern mekanikler, son üç kinematik çiftinin uygulanmasına dayanır.
Her bir gövdenin (bağlantı) kendi geometrisine sahiptir. Bu nedenle, bu forma karşılık gelen elemanlar da temastadır. KP'nin, bağlantıların geometrisiyle çelişmeyecek şekilde yalnızca böyle bir hareketi gerçekleştirebileceği ortaya çıkıyor. Ek olarak, birbirleriyle ilgili herhangi bir hareket yapmak için, bir link kalıcı olarak sabitlenmeli ve çiftin ikincisi etkilenmelidir.
Hareket anında bağlantıdaki her noktayolu geçer (yörünge). Bu yörünge, bir düzlemde bulunan bir eğri formuna sahip olabilir. Çiftteki bağlantıların yol eğrilerinin düzlemleri birbirine paralel olduğunda, düz bir çifttir. Bağlantı noktalarının hareketinin eğrileri üç boyutlu uzayda bulunursa, kinematik çift uzamsaldır.
türleri
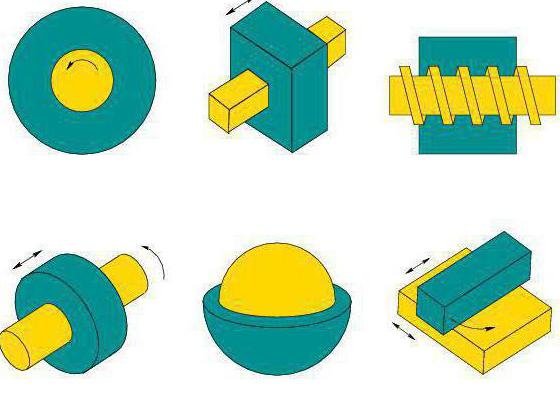
Aşağıdaki mekanizmalar vardır.
Rotasyonel çifti tek mobil bir sistemdir. Böyle bir çifti oluşturan bağlantılar, çubuk veya eksen etrafında sadece bir karakteristik rotasyon yapabilir. Bu durumda, elemanların teması silindirik bir şeklin yüzeyi üzerinde gerçekleştirilir. Böyle bir geometrik sistem kapalı ve alt olanlara aittir. Daha yüksek çiftler alanındaki mekanizma-analog bir bilye yatağıdır.
Bir çift ilerici etkileşim bir öncekiyle aynıtek boyutluluğun Böyle bir sistemde, bağlantılar sadece çevirme hareketini doğrusal bir yönde gerçekleştirebilir. Mekanizma geometrik parametrelerde kapalı en düşük çifttir.
Etkileşen silindirlerin bir çift. Bu sistem zaten iki hareketli, geometrisi kapalı. Bu aşağıdır - bağlantılar hem ileriye doğru hem de dönebilir ve hareket edebilir.
Küresel tip çifti üçlü bir sistemdir. Böyle bir çiftin özgürlüğü, bağlantıların koordinat eksenlerini açıklayan üç boyutlu uzayda dönmesine izin veren bir dereceye sahiptir. Aynı zamanda en düşük geometrik kapalı mekanizmadır.
Bir parmak ile küresel tip çifti - İki hareketli. Bu çiftteki bağlantıların hareketi (nispeten bağımsız rotasyon) parmak ve yarık tarafından sınırlandırılmıştır. Alt sipariş çifti geometrik olarak kapalı.
Vida tipi çifti tek hareketlilik derecesi serbesttir. düşük seviyede mekanizma hareket sadece belirli adımlar sarmal doğasına uygun olarak mümkün olduğu bir geometrik kapalı bir sistemdir. esas olarak açık bir şekilde açısal ve doğrusal bir yönde hareket.
Bir çift düz tip, düzlem-silindir, düzlem-top. Bu mekanizmalarda zorla kapatma kullanılır. Sınıfta, ilk alt, geri kalanı daha yüksek sistemlere atıfta bulunur. Pratikte, bu tür kinematik çiftler uygulaması bulunamamıştır.
sınıflandırma
KP aşağıdaki sınıflandırmaya sahiptir.
- İletişim yerindeki iletişim türüne göre.
En düşük siparişin çiftleri bağlantılarla bağlantıya geçiriliryüzeyler. Mekanizmada geniş uygulama bulmuşlar, daha yüksek çiftlerden daha basit bir tasarıma sahipler. Yapısal olarak, bağları düzlemlere temas eder ve yanlarında süzülür. Böylelikle yük, elemanın içinde eşit olarak dağıtılır, ancak bağlantıların birleşme noktasında sürtünme, sırasıyla artar. En düşük mertebeden çiftlerin pozitif momentleri, büyük yükleri bağlantıdan bağlantıya transfer etmenin mümkün olmasıdır.
Daha yüksek kinematik çiftler iletişim bağlantılarına sahiptireğri veya puan ile. Onların asıl amacı, hareket sırasında linklerin elemanları arasındaki sürtünme derecesini azaltmaktır. Daha yüksek çiftlerin klasik bir örneği rulman veya makaralardır. Bu elemanların iç tasarımı, çiftlere bağlanan bağlantıların hareketini etkilemez. Mekanizmayı basitleştirmek için, yüksek kinematik çiftleri daha düşük analoglarla değiştirmek için yöntemler kullanılır.
- Çiftin bağlantılarının yaptığı nispi hareket türüyle.
- Döner.
- Progresif.
- Silindirik.
- Küresel.
- Vidalı tip.
- Düz.
Mekanizma sadece ilk dört hareket tipini kullanan çiftleri içeriyorsa, buna manivela türü denir.
- Bağlantılar arasındaki iletişim türüne göre.
- Kuvvetle, örneğin, yay basıncı, vücut ağırlığı, sıkıştırılmış gaz veya sıvı, atalet kuvvetleri.
- Parçanın elemanlarının geometrik tasarımı nedeniyle.
- Hareket sırasında bağlantıların hareketlilik derecesiyle.
- İletişim koşullarının sayısına göre.
Tersinir ve geri dönüşümsüz mekanizmalar
Mümkünse, sistemdeki bağlantıların koşullu olarak sabitlenmiş bir link seçimine göre hareketleri, tersinir ve geri çevrilemez CP'ler ile ayırt edilir.
Mekanizmada herhangi bir eleman serbest iseDurum, öğenin göreceli hareketini koşullu hareketsiz halde tekrarlar, daha sonra kinematik çiftin tersinir olduğu düşünülür (örnek - tek hareketli çiftler).
Mekanizmada, serbest durumda bulunan her eleman, göreceli hareketini diğerlerinden farklı kılarsa, bu durumda bir çift geri döndürülemez.
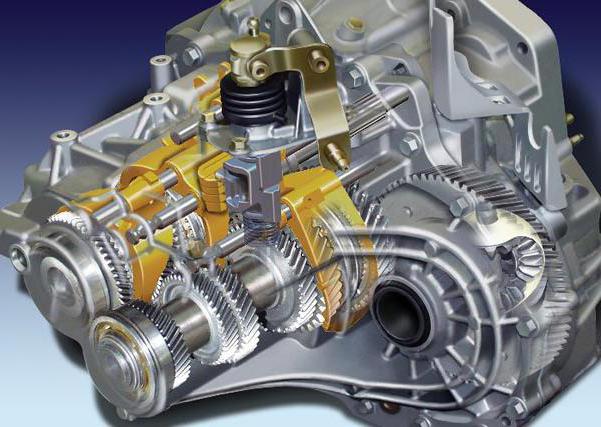
Mekanikte vites çeşitleri
Mekanik transmisyon ile mekanikMotorun kinematiğini ve enerjisini, belirli bir modda çalışması için makinelerin çalışan gövdeleri tarafından kullanım için kabul edilebilir bir forma dönüştüren bir sistem.
Programlar var:
- Dişli türü. Bu bağlantı, silindirik ve konik elemanlara dayanmaktadır. Birincisi hareketi bir düzlemde, ikincisi bir açıda iletir. Dişli şanzımanları, kompaktlık ve büyük kapasitelerin aktarılma olasılığı ile karakterizedir. Çok verimlidirler, ancak çalışma sırasında gürültü oluşturur ve yağlama gerektirir.
- Vidalı tip. Klasik vidaya ek olarak, bu kategori hipoid ve sonsuz dişliler içerir. İkinci tip mekanik şanzıman, büyük bir dişli oranının elde edilmesi gerektiğinde kullanılır. Bunlar ayrıca işteki gürültüsüzlük ve pürüzsüzlük ve kendini inhibe etme yeteneği ile ayırt edilir. Yetersizlik düşük verim ve yüksek aşınma içerir.
- Esnek elemanlarda. Burada çeşitli kayışlar ve zincirler nedeniyle hareket ve enerji bir düzlemde iletilir. Kayış transferleri basittir ve büyük mesafeleri kapsayabilir.
- Sürtünme tipi. Bu nitelikteki ilişkilerde sürtünme kuvveti kullanılır. Zor şartlar altında çalıştırılan mekanizmalarda kullanılırlar.

Bilyalı eklem tipi
Bilyalı eklemin ana amacıDireksiyon rafının enine kesitli çubuğu, tekerleğin döner tabla ile manivelaya bağlanabilir. Menteşe tasarımı bir ipucu içerir; İçinde entegre krakerler, bir yay, bir sıkma başlığı, bir küresel parmak, bir yağ olabilir. Yay, küresel şeklin yüzeyinin parmağını koruduğu bilyalı eklemin bilyaları üzerinde presler. Bu tasarım, mekanizmanın tükendiği zaman bile çalışmasını sağlar.

Menteşe döngü
Menteşeler veya kanopiler - üzerine inşa edilmiş mekanizmalarsilindirik menteşenin tabanı. Kapıları, pencereleri, mobilya kapılarını açmaya ve kapatmaya hizmet ederler. menteşe tasarımı iki dikdörtgen tespit deliği delinir olan ağları (kart) ve çubuk içerir. Menteşe menteşeleri çoğunlukla çelik ve çeşitli alaşımlardan yapılır.

Sonuç
İnsan eklemlerinin yukarıda açıklanan tüm ana kinematik çift tipleri olması ilginçtir. Bu nedenle, mekaniğin içinde yer alan süreçlerin anlaşılmasına duyulan ihtiyaç açıktır.